Introduction
Today our focus was on generating a point cloud data set, a true orthomosaic, and a digital surface model using Pix4Dmapper. We processed our image data with the Pix4D software and then made maps with the generated data in ArcGIS Pro. Also, ArcScene was used to create 3D effects.
What is Pix4D?
It can create video animation trajectories. Like we will see below, the user has the option to choose his own trajectory by deciding the order of waypoints. The quality of the video rendering can also be chosen, fitting the need. If one is out in the field but just want the result of the imaging collection, one could go for the fast but low-resolution option, the Rapid Check. Saving the real encoding and high quality for later processing. The software also gives the option of saving the coordinates from the flying route in a specific csv-file.
Pix4DMapper can process imagery from multiple flights. However, the pilot needs to pay attention that each plane captures the images with enough overlap. Also, weather conditions are key, big differences will cause trouble.
Not only nadir images is possible to use, but also oblique images is doable. especially in terrain with elevation, it could be useful. Using oblique images, the angle should be between 0 and 45 degrees in both tracks to the center of the corridor.
Why is it so integral to UAS data processing?
With Pix4DMapper one can do so many things in an easy way. This will be demonstrated throughout this report. To start with some basics. For most image collections, it is suggested a frontal overlap of at least 75% and no less than 60% side overlap between the flying tracks. For the sake of quality, it benefits if the camera is maintained at a constant height to ensure desired ground sample distance. Reservations have to be made, sometimes it is hard to map terrains like sand and snow. Also, areas with great elevation differences should be carefully selected.Methods
This section will illustrate the process, working with Pix4DMapper. In Figure 1, below is the basic workspace.
 |
| Figure 1: The workspace in Pix4DMapper. |
The key metadata we are working with, presented in Table 1 below.
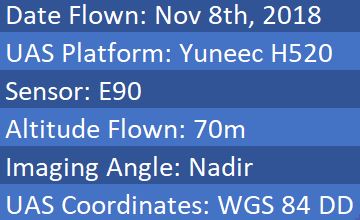 |
| Table 1: Table with metadata for this UAS mission. |
As one can see in the specification tree in Figure 2 below, Pix4DMapper structure the content in terms of Cameras, Rays, Tie points, Point Clouds, Triangle Meshes and Objects with their associated subfolders. This structure makes it very effortless to localize.
 |
| Figure 2: Pix4DMapper structure |
Examining the Quality report, one can find many interesting features. At the bottom of Figure 3 below one can see the differences between the initial image positions (blue dots) and the green, which are the new computed tie points positions. The ellipses display the uncertainty.
 |
| Figure 3: The initial blue and the processed green tie points displayed. |
In terms of camera specifics, one could name a few things. If the camera has a global shutter, all light information is read at the same time for the whole sensor. The linear rolling shutter process the light information differently in the way that its image is scanned line by line. In Figure 4 below, one can see the linear rolling shutter processed for this flight. The green lines are the computed image positions while the blue dots are the camera position at the start of the exposure. Bottom left is a hole, this is where the one image that was not successfully calibrated belongs. It can be spotted as the red dot in Figure 3 above and in Figure 5 below.
 |
| Figure 4: The linear rolling shutter processed for this flight. The green lines are the computed image positions while the blue dots are the camera position at the start of the exposure. Bottom left is a hole, this is where the one image that was not successfully calibrated belongs. It can be spotted as the red dot in the Figure below. |
 |
| Figure 5: Watch out for red dots, which indicate disabled or uncalibrated images. |
GCPs are not necessarily required for processing imagery with Pix4Dmapper. However, they would have increased the absolute accuracy significantly. The usage of GCP is highly recommended when processing projects no image geolocation. GeoTIFF is preferred using as a metadata standard when working with UAS data. It allows georeferencing information to be embedded in the TIFF image files.
Results and Discussion
Below is the result of the video I created with Pix4DMapper.
Video 1: My video, created with Pix4DMapper
In order to display come caveats of the processing in Pix4DMapper, I decided to use ArcScene. My purpose was to see in what degree Pix4DMapper handled areas with elevation or dense wood. By using the Hillshade effect in ArcScene, troubled areas, where the processing wasn't that good are easier to discover. Figure 6 re-illustrates the process from an earlier lab.
 |
| Figure 6: I dedicate an image of this great ArcScene feature for the memory. |
ArcScene will reveal the drawback of Pix4DMapper. As it comes out from Figure 7, without many images with good overlap, good elevation data will simply not get displayed properly. Looking at those steep and plain areas to the left and right of the house acknowledge this. Also, the uncalibrated image, remembering the red dot, was located in this area.
 |
| Figure 7: Plain area(s) are problematic in terms of elevation is not processed correctly. |
Last week we learned how to create orthomosaics and maps in ArcGIS Pro. This week we used Pix4D for point cloud creation and from there stitch the imagery together, which proved to be superior quality. Before using Pix4D, one could think that the quality and the accuracy for ArcGIS Pro was good.
Figure 8 displays the two maps that I created out of the data processed through Pix4DMapper. On the grey scale, Digital Surface Model one see the problematic areas very clearly, this is where Pix4DMapper failed to process the data. Where the software has done a great job, there is also very detailed information about the ground. Vegetation, cars and even human are spotted.
 |
| Figure 8: Digital Surface Model, with interposed visuals from ArcScene, showing Dr. Hupy's house from different angles. |
The bottom-left image in Figure 9, one sees clear differences in quality in comparison to Figure 10. However, we haven't worked with GCPs as of yet nor oblique imagery so the quality and accuracy may continue to improve.
 |
| Figure 9: Imagery and map creation with Pix4D resulted in a high-caliber quality. |
Figure 10 represents the results from last weeks processing, which we made in ArcGIS Pro. In reality, there were no trees covering the red car. With greater accuracy of the process, these blunders were corrected.
 |
| Figure 10: Imagery accuracy with ArcPro was not so good in comparison with Pix4D. |
This looks good, right? But delving deeper in the statistics it turns out that it is not as good as one would have hoped. The relative geolocation variance is as follows from the table below. According to Table 2, the accuracy on the ground is set to 5 meters, while the elevation may vary as much as 10 meters. Also, this number increases when flying in areas with greater height variances, since the uncertainty increases.
 |
| Table 2: Elevation accuracy (z-value) is a real problem. |
Table 3 displays the processing time to be just over 30 minutes. Table 4 illustrates that 67 images were used but only 66 was calibrated.
 |
| Table 3: Processing time stopped at half an hour. |
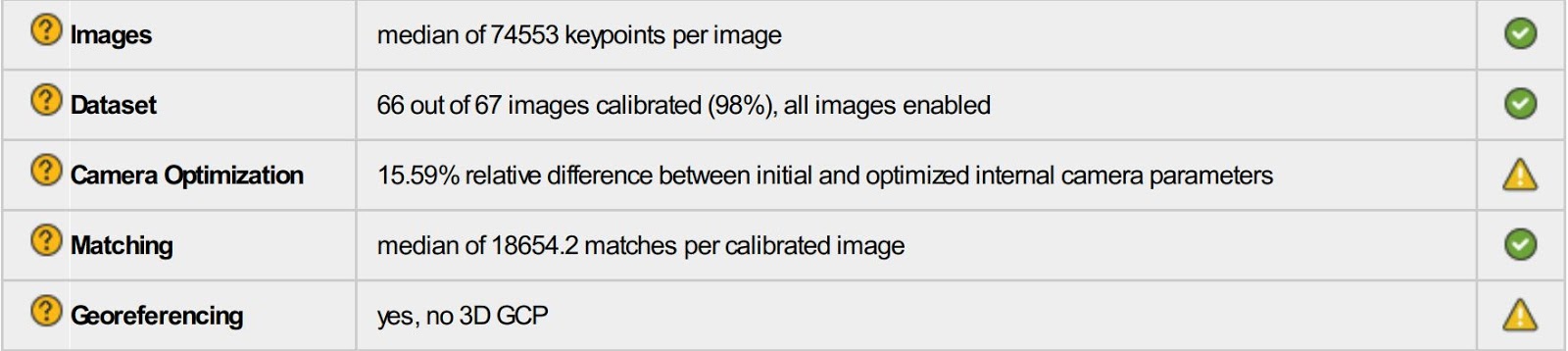 |
| Table 4: 67 images were enabled, 66 calibrated. |
Conclusions
Focus lay on generating a point cloud data set, a true orthomosaic, and a digital surface model using Pix4Dmapper. We processed our image data with the Pix4D software and then made maps with the generated data in ArcGIS Pro.
Without many images (5+) with good overlap, elevation data simply will not get displayed properly. In this report, the process has been gone through very thoroughly. Looking at plain areas acknowledge this.
 |
| Figure 11: Processing an orthomosaic in ArcGIS Pro took about 8 minutes. |
Remembering from last week, Figure 11 processing an orthomosaic in ArcGIS Pro took about 8 minutes. A drawback using Pix4DMapper is that in order to create greater results, it takes a longer time to process. Is it worth it? The user's need has to tell.
No comments:
Post a Comment